

DIY Project
DIY Long Backup UPS
Homemade Long Backup time UPS made from Modified Cheap Computer UPS. Provides 40Ah of Backup at 300W of MAX Load.

Homemade Long Backup time UPS made from Modified Cheap Computer UPS. Provides 40Ah of Backup at 300W of MAX Load.

National Geographic Explorer Niharika Rajput launched an extensive art and education project in the Palani Hills of South India, focusing on 13 bird species in the Shola Sky Island ecosystem, utilizing art, education, engineering, and storytelling to raise environmental awareness and promote conservation.
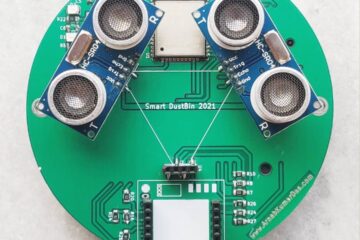
ESP32 and SIM800L based IoT Smart Dustbin with Wi-Fi , BLE and Cellular Communication. It is Capable of Measuring Dustbin Contents and Update Cloud Servers for Efficient Emptying of Dustbin.
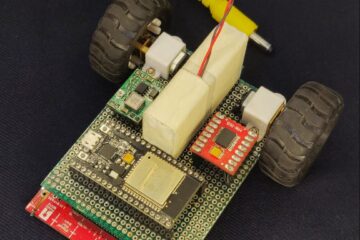
ESP32 QTR-8RC PID Line Follower Robot Tutorial / ESP32 Microcontroller | ESP32 PID Line Follower Tutorial | ESP Pololu PID Tutorial
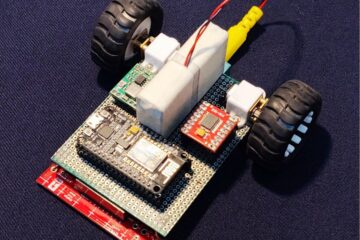
ESP8266 QTR-8RC PID Line Follower Robot Tutorial / ESP8266 Microcontroller | ESP8266 PID Line Follower Tutorial | ESP Pololu PID Tutorial

Extensive Practical Comparison of the Raspberry Pi 4 and AGX Xavier with Benchmarking and Performance Analysis

Extensive Practical Comparison of the Nvidia Jetson Nano and AGX Xavier with Benchmarking and Performance Analysis

Extensive Practical Review of the AGX Xavier Developer Kit with Benchmarking and Performance Analysis of the embedded system-on-module (SoM).
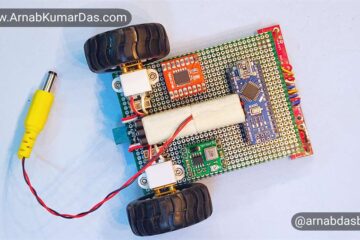
Arduino Nano QTR-8RC PID Line Follower Robot Tutorial / ATmega328p Microcontroller | Arduino PID Line Follower Tutorial | AVR Pololu PID Tutorial
Raspberry Pi Pico / RP2040 Microcontroller Create and Build New C/C++ Project in Windows 10 | Raspberry Pi Pico Programming Tutorial

Raspberry Pi Pico / RP2040 Microcontroller C/C++ SDK and Toolchain Setup in Windows 10 | Raspberry Pi Pico Programming Tutorial
AVR Analog Comparator / Arduino / ATmega328p Microcontroller | Embedded C Register Level Programming Tutorial | AVR Analog Comparator Tutorial
AVR Interrupt and External Interrupt / Arduino / ATmega328p Microcontroller | Embedded C Register Level Programming Tutorial | AVR Internal Interrupt and External Interrupt Tutorial
AVR System Clock Distribution and Control / Arduino / ATmega328p Microcontroller | Embedded C Register Level Programming Tutorial | AVR 8-Bit ATmega328P System Clock Tutorial
AVR Memory Architecture / Arduino / ATmega328p Microcontroller | Embedded C Register Level Programming Tutorial | AVR 8-Bit ATmega328P Memory Architecture Tutorial